Bộ thực hành chi phí thấp để giảng dạy các chủ đề về Điều khiển và Cơ điện tử
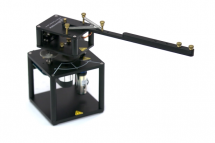
Quanser Qube-Servo 3 là một bộ thực hành động cơ servo tích hợp đầy đủ, di động được thiết kế dành riêng cho việc giảng dạy các khái niệm điều khiển ở cấp đại học. Hệ thống được trang bị một động cơ DC chổi than truyền động trực tiếp chất lượng cao, hai bộ mã hóa, hệ thống thu thập dữ liệu nội bộ và bộ khuếch đại. Kết nối bằng USB với PC Windows (sắp có hỗ trợ macOS và Linux).
Qube-Servo 3 đi kèm với một đĩa quán tính có kết nối nhanh và mô-đun con lắc ngược. Bạn cũng có thể thiết kế và in 3D mô-đun của riêng mình để mở rộng phạm vi thí nghiệm hoặc tạo một dự án hấp dẫn dành cho sinh viên. Tận dụng tài liệu khóa học toàn diện được điều chỉnh theo tiêu chuẩn ABET cho MATLAB® Simulink® hoặc thiết kế và xác thực các bộ điều khiển của riêng mình với hỗ trợ ngôn ngữ bổ sung sử dụng Python và C/C++, Các tính năng mới bao gồm khả năng vô hiệu hóa bù dải chết và điều khiển trực tiếp chu kỳ nhiệm vụ PWM.
Học liệu
Mô đun đĩa quán tính:
- Tích hợp phần cứng
- Lọc
- Mô hình đáp ứng bước
- Mô hình sơ đồ khối
- Ước lượng tham số
- Mô hình đáp ứng tần số
- Mô hình không gian trạng thái
- Nhận dạng ma sát
- Phân tích ổn định
- Hệ thống bậc hai
- Độ ổn định Routh-Hurwitz
- Độ ổn định Nyquist
- Điều khiển PD
- Điều khiển tỷ lệ
- Lỗi trạng thái ổn định
- Mất cân bằng tải
- Độ chắc chắn
- Điều khiển tối ưu
- Giới thiệu về điều khiển rời rạc
- Thiết kế điều khiển rời rạc
- Điều khiển rời rạc ổn định
Mô đun con lắc ngược:
- Lực quán tính
- Mô hình con lắc ngược
- Mô hình không gian trạng thái
- Điều khiển cân bằng con lắc ngược
- Điều khiển hất lên
- Điều khiển cân bằng phản hồi trạng thái LQR
- Đáp ứng trạng thái vị trí cực
- Điều khiển cân bằng
Thông số kỹ thuật
- Kích thước (w x h x d): 10.2 x 1.02 x 11.7 cm
- Khối lượng: 1.083 kg
- Chiều dài con lắc ngược (từ trục quay đến đầu mút): 9.5 cm
- Độ phân giải bộ mã hóa động cơ DC (chế độ góc phần tư): 2,048 xung đếm/vòng quay
- Độ phân giải bộ mã hóa mô đun con lắc ngược (chế độ góc phần tư): 2,048 xung đếm/vòng quay
- Điện áp định mức động cơ DC: 24 V
- Dòng điện định mức động cơ DC (không tải): 0.16 A
- Tốc độ dịnh mức động cơ DC (không tải): 5,400 rpm
- Cảm biến dòng điện: 12-bit, 16 mẫu PWM được đồng bộ hóa lọc kỹ thuật số
- Bộ mã hóa: 2 x 24-bit
- Bộ đo tốc độ kỹ thuật số: 2 x 32-bit với độ phân giải 13.8ns
- Giao diện: USB

_thumb_500x344.PNG)