Giới thiệu các khái niệm và lý thuyết điều khiển trung gian liên quan đến những thách thức mà các kỹ sư gặp phải trong cuộc sống thực tế.
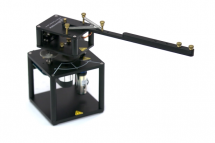
Mô-đun con lắc ngược chuyển động quay được gắn vào khối đế Servo chuyển động quay, mở rộng các chủ đề cơ điện tử và điều khiển được giảng dạy. Mô-đun con lắc ngược mang đến những thách thức cho sinh viên không chỉ mô hình hóa và điều khiển con lắc ngược mà còn tìm hiểu về các hệ thống điều khiển hybrid bằng cách điều chỉnh hệ thống điều khiển hất lên. Ngoài việc giảng dạy các khái niệm điều khiển trung gian, Con lắc ngược chuyển động quay có thể được sử dụng để nghiên cứu trong các lĩnh vực khác nhau, bao gồm cả điều khiển mờ.
Học liệu
Chủ đề mô hình hóa
- Biểu diễn không gian trạng thái
- Tuyến tính hóa
Chủ đề điều khiển
- Điều khiển hybrid
- Điều khiển cân bằng phản hồi trạng thái sử dụng vị trí cực
- Điều khiển dựa trên năng lượng/phi tuyến tính
Thông số kỹ thuật
- Chiều dài cánh tay quay: 21.6 cm
- Chiều dài con lắc ngược: 33.7 cm
- Khối lượng con lắc ngược: 127 g
- Độ phân giải bộ mã hóa (trong chế độ góc phần tư): 4096 xung đếm/vòng quay

_thumb_500x344.PNG)