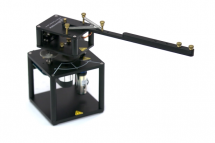
Bộ thực hành chi phí thấp để giảng dạy các chủ đề về Điều khiển và Cơ điện tử
Quanser QUBE™-Servo 2 là một bộ thực hành dạng mô-đun động cơ servo được tích hợp đầy đủ, được thiết kế để giảng dạy các khái niệm về cơ điện tử và điều khiển ở cấp đại học.
Học liệu:
Mô đun đĩa quán tính
- Tích hợp phần cứng
- Lọc
- Mô hình đáp ứng bước
- Mô hình sơ đồ khối
- Ước lượng tham số
- Mô hình đáp ứng tần số
- Mô hình không gian trạng thái
- Nhận dạng ma sát
- Phân tích ổn định
- Hệ thống bậc hai
- Độ ổn định Routh-Hurwitz
- Độ ổn định Nyquist
- Điều khiển PD
- Điều chỉnh theo tỷ lệ
- Lỗi trạng thái ổn định
- Mất cân bằng tải
- Độ chắc chắn
- Điều khiển tối ưu
- Giới thiệu về điều khiển số
- Ổn định rời rạc
- Giới thiệu về điều khiển rời rạc
Mô đun con lắc ngược
- Lực quán tính
- Mô hình con lắc
- Mô hình không gian trạng thái
- điều khiển cân bằng con lắc ngược
- Điều khiển hất lên
- Điều khiển cân bằng phản hồi trạng thái LQR
- Đáp ứng trạng thái vị trí cực
- Điều khiển cân bằng
Thông số kỹ thuật:
- Kích thước (w x h x d): 10.2 x 1.02 x 11.7 cm
- Khối lượng: 1.2 kg
- Chiều dài con lắc ngược (từ trục đền đầu con lắc): 9.5 cm
- Độ phân giải bộ mã hóa động cơ DC (chế độ góc phần tư): 2,048 xung đếm/vòng quay
- Độ phân giải bộ mã hóa mô đun con lắc ngược (chế độ góc phần tư): 2,048 xung đếm/vòng quay
- Điện áp định mức động cơ DC: 18 V
- Dòng điện định mức động cơ DC: 0.54 A
- Tốc độ định mức động cơ DC (không tải): 4,050 rpm
- Các giao diện có sẵn:
+ QFLEX 2 USB: Hỗ trợ cho MATLAB/Simulink (Sử dụng phần mềm QUARC)
+ QFLEX 2 myRIO: Hỗ trợ cho LabVIEW
+ QFLEX 2 Embedded: SPI

_thumb_500x344.PNG)