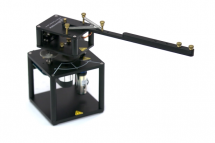
Mô-đun con lắc ngược kép chuyển động quay là lý tưởng để giới thiệu các khái niệm điều khiển cấp độ đai học và nâng cao, đưa thử thách con lắc ngược đơn cổ điển lên một cấp độ phức tạp cao hơn. Ví dụ, thể hiện và khám phá các thách thức điều khiển trong thế giới thực liên quan đến ổn định cất cánh của tên lửa nhiều tầng.
Mô-đun con lắc ngược kép chuyển động quay bao gồm một cánh tay phẳng gắn vào khối đế servo chuyển động quay. Một thanh con lắc ngắn được gắn vào trục kim loại của cánh tay, được trang bị bộ mã hóa có độ phân giải cao đo góc của con lắc. Bộ mã hóa thứ hai được gắn trên đỉnh của con lắc ngắn, đo góc của thanh con lắc thứ hai, dài hơn. Khối đế servo quay cánh tay với con lắc ngược kép trong mặt phẳng nằm ngang.
Học liệu
Các chủ đề mô hình hóa
- Đạo hàm Lagrange
- Biểu diễn không gian trạng thái
- Tuyến tính hóa
Chủ đề điều khiển
- Bộ điều chỉnh tuyến tính-bậc hai
Thông số kỹ thuật
- Chiều dài cánh tay quay: 21.6 cm
- Chiều dài con lắc ngược ngắn: 20 cm
- Chiều dài con lắc ngược dài: 33.65 cm
- Độ phân giải bộ mã hóa (trong góc phần tư): 4096 xung đếm/vòng quay

_thumb_500x344.PNG)