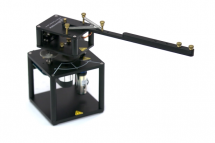
The Rotary Flexible Link experiment is ideal for studying concepts related to control of vibration and resonance in large, lightweight structures with flexibilities. The experiment is also useful when modelling flexible links on robots or spacecraft.
The Rotary Flexible Link module consists of a stainless steel flexible link with a strain gage that detects the deflection of the link’s tip. The module attaches to the Rotary Servo Base Unit, rotating the flexible link in a horizontal plane.
Courseware
Modelling Topics
- Lagrange derivation
- State-space representation
- Model validation
- Parameter estimation
Control Topics
- State-feedback control
- Linear Quadratic Regulator
- Vibration control
Device Specifications
- Dimensions of the Rotary Flexible Link module (L x H): 48 x 2 cm
- Weight of the flexible link: 0.065 kg
- Flexible link length (strain gage to tip): 41.9 cm
- Flexible link moment of inertia: 0.0038 kg.m²
- Strain gage calibration gain: 1/16.5 rad/V
- Strain gage measurement range: ± 5 V

_thumb_500x344.PNG)