Courseware
Inertia disk module:
- Hardware integration
- Filtering
- Step response modeling
- Block diagram modeling
- Parameter estimation
- Frequency response modeling
- State-space modeling
- Friction identification
- Stability analysis
- Second-order systems
- Routh-Hurwitz stability
- Nyquist stability
- PD control
- Lead compensator
- Proportional control
- Steady-state error
- Load disturbance
- Robustness
- Optimal control
- Introduction to discrete control
- Discrete control design
- Discrete control stability
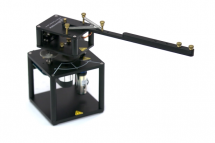
Inverted Pendulum Module:
- Moment of inertia
- Pendulum modeling
- State space modeling
- Pendulum balance control
- Swing-up control
- LQR state-feedback balance control
- Pole-placement state-feedback
- Balance control
Device Specifications
- Dimensions (w x h x d): 10.2 x 1.02 x 11.7 cm
- Weight: 1.083 kg
- Pendulum length (pivot to tip): 9.5 cm
- DC motor encoder resolution (quadrature mode): 2,048 counts/revolution
- Pendulum module encoder resolution (quadrature mode): 2,048 counts/revolution
- DC motor nominal voltage: 24 V
- DC motor nominal current (no Load): 0.16 A
- DC motor nominal speed (no load): 5,400 rpm
- Current sense: 12-bit, with 16 sample PWM synchronized digital filtering
- Encoder: 2 x 24-bit
- Digital tachometer: 2 x 32-bit with 13.8ns resolution
- Interface: USB

_thumb_500x344.PNG)