Courseware
• Sensor interfacing and signal conditioning
• Experimental system identification
• Theoretical system modelling
• Parameter estimation and model validation
• Speed and position control
• Controller design to specification
• Gain scheduling and aerospace control
• State-space modelling and control
• LQR controller optimization
• Kalmann filters/LQG controller design
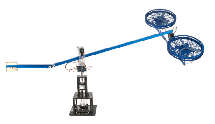
Device Specifications
• Device Dimensions (D x W x H): 18 cm x 52 cm x 40 cm
• Operating Space (D x W x H): 52 cm x 52 cm x 62 cm
• Mass: 4.7 kg
• Pitch Angle Range: 90° (± 45° from horizontal)
• Yaw Angle Range: 360° Continuous
• Pitch Encoder Resolution: 2880 counts/revolution
• Yaw Encoder Resolution: 4096 counts/revolution
• Prop Thrust Constant: 5 x 10^-4 N-s/rad
• Inertial Thrust Constant: 0 .042 Nm/A
• Inertial Measurement Unit (IMU): IIM-42652 Compact 6-Axis MEMS Device
• Tri-axis Gyroscope Range: +- 500 dps
• Tri-axis Accelerometer Range: +-2g

_thumb_500x344.JPG)