CURRICULUM TOPICS PROVIDED
• Derivation of simple dynamic model
• State space representation
• State feedback control
• LQR control design
• Control parameter tuning
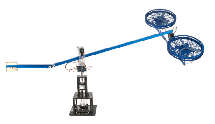
DEVICE SPECIFICATIONS
• Device mass: 3.46 kg
• Device height (ground to top of base): 45 cm
• Helicopter body mass: 1.39 kg
• Helicopter body length: 48 cm
• Base dimensions – W × L: 17.5cm × 17.5 cm
• Encoder resolution (in quadrature): 8192 counts/rev
• Pitch angle range: 75 (± 37.5 deg)
• Yaw angle range: 360 deg
• Motor / propeller force-thrust constant: 0.119 N/V
• Motor / propeller torque thrust constant: 0.0036 N.m/V
• Propeller diameter: 20.3 cm
• Propeller pitch: 15.2 cm
• Motor armature resistance: 0.83 Ω
• Motor current-torque constant: 0.0182 N.m/A