CURRICULUM TOPICS PROVIDED
• System open-loop and closed-loop transfer functions
• Stability analysis using Routh-Hurwitz method
• Time-domain and frequency-domain control design and analysis
• Interactive simulations using virtual reality and on-the-fly parameter tuning
• Compensator design and tuning using Root Locus
• LEAD compensator design for gyroscope precession angle with on-the-fly real-time control parameter tuning
• Full state feedback LQR controller design with on-the-fly real-time control parameter tuning
• Non-minimum phase control design
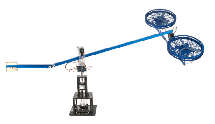
DEVICE SPECIFICATIONS
• Dimensions – H × W × L: 70 cm × 50 cm × 50 cm
• Device mass: 27.3 kg
• Disc encoder resolution (in quadrature): 4096 count/rev
• Gimbal/frame encoder resolution (in quadrature): 4000 count/rev
• Disk motor power: 44.5 W
• Gimbals/frame motor power: 266 W
• Rotor mass: 1.91 kg
• Rotor diameter: 0.152 m
• Rotor thickness: 0.0127 m