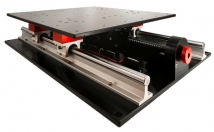
Hexapod là nền tảng chuyển động robot song song sáu bậc tự do (DOF) cấp nghiên cứu có khả năng đạt được gia tốc cao. Hexapod là một nền tảng kiến trúc mở có thể được lập trình thông qua phần mềm QUARC cho Simulink. Không giống như hầu hết các nền tảng Stewart có bán trên thị trường, Hexapod bao gồm sáu bộ truyền động vít bi tuyến tính chất lượng cao và được điều khiển bởi sáu động cơ DC vượt trội, giúp nó hoạt động chính xác, phản hồi nhanh và ít phải bảo trì. Với tải trọng lên tới 100 kg và các tính năng an toàn, Hexapod là thiết bị mô phỏng chuyển động lý tưởng cho bất kỳ phòng thí nghiệm nghiên cứu nào tập trung vào cách ly rung, động lực học kết cấu, mô phỏng nhúng hoặc phục hồi chức năng.

_thumb_500x344.png)