Overviews:
› Lightweight and portable
› Easy to configure for all levels of robotics expertise
› Adaptable for many applications, scenarios and environments
› ROS compatible in addition to our class-leading open API
› Intuitive Web interface from any desktop or mobile device
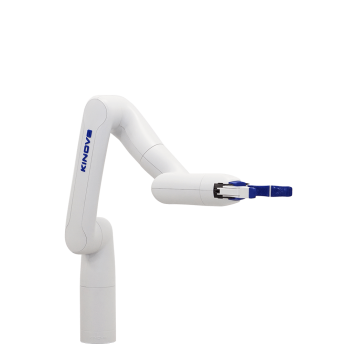
TECHNICAL SPECIFICATIONS - ROBOT
- Weight: 5.4 kg
- Payload:
+ 600 g (mid-range, continuous)
+ 1000 g (full-reach, temporary)
+ 500 g (full-range, continuous)"
- Maximum reach (fully extended): 760 mm (to gripper center reference)
- Maximum Cartesian translation speed: 50 cm/s (low-level), 30cm/s (high-level)
- Degrees of Freedom: 6 DoF
- Actuators:
+ Small - Actuators 4,5,6
+ Medium - Actuators 1,3
+ Big - Actuators 2
- Capacitive wrist interaction buttons: Quantity : 2 (programmable)
- Power supply voltage: 18 to 30 VDC (24 VDC nominal)
- Robot power usage:
+ 20 W (average)
+ 100 W (peak)
- Materials:
+ Aluminum
+ Polycarbonate, reinforced nylon
- Internal communications and control: Ethernet (100 Mbps)
- Operating temperature: 0 to 40 degree C
- Robot Ingress Protection: IP22
TECHNICAL SPECIFICATIONS - SOFTWARE / CONTROL
- Low-level control: Position, velocity, current
- High-level control: Cartesian twist (linear& angular velocity), joint speed
- High-level control features (mode dependent): Protection zones - rectangular, spheric, cylindrical handling
- Servoing modes: High level, low-level
- Connectivity: Micro USB: Ethernet over RNDIS
- USB-A: Connecting controller & charging devices connecting USB to - - Ethernet (RJ45) Dongle
- Supported ROS distribution: Kinetic Kame
- Boot time: 30 seconds
- Internal communication frequency: 1 kHz