Overviews
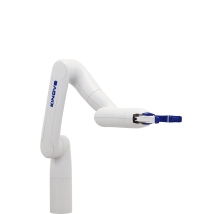
- The KINOVA® Gen3 Ultra lightweight robot is built for human-robot interaction. Its deliberate design and functionality ensure safety and performance in any research environment
- The controller makes it simple to connect your robot in a number of convenient ways and is adaptable for multiple application needs.
- Direct access to each individual actuator (closed-loop control at 1 kHz)
- Connect your robot with multiple controllers as required - each of which can be optimized for a specific task
- Built from the ground up with researchers in mind, the KINOVA® Gen3 Ultra lightweight robot is the first with built-in discrete 2D and 3D sensors, ideal for vision-based applications
- Simple connectivity with a wide variety of end effectors, instruments and sensors
GENERAL
- Total Weight: 8.2 kg (no gripper)
- Payload:
+ 4 kg (mid-range continuous; no gripper)
+ 4.5 kg (full-reach peak/temporary; no gripper)
+ 1.1 kg (full-reach continuous; no gripper)
- Actuator joint range after start-up(software limitation): Infinite1
- Maximum Cartesian translation speed:
- Low-level: 40 cm/s (recommended)
- High-level: 30 cm/s
- Power supply voltage: 18 to 31 VDC, 24 VDC nominal
- Average power: 36 W (25 W in standby)
- Peak power: 155 W
- Water resistance:
+ Arm: IP33
+ Base / controller: IP33
- Operating temperature: -30 °C to 35 °C
- Materials:
+ Carbon fiber
+ Aluminium
- Maximum reach: 902 mm
- Degrees of freedom: 7 DoF
- Actuator sensors: Torque, position, velocity, current (motor), voltage, temperature (motor)
- Actuators:
+ Large: joints #1, 2, 3, 4
+ Small: joints #5, 6, 7
BASE CONTROLLER
- Software: KINOVA® KORTEX™
- Internal communications: 2 x Fast Ethernet (100 Mbps)
- API compatibility: Windows 10, Linux Ubuntu 16.04, ROS Kinetic
- Programming languages: C++, Python, MATLAB2
- Supported web browser: Google Chrome 64+
- Controller interfaces
- Control system frequency: 1 kHz
- Servoing modes: High-level, low-level, low-level bypass
- Low-level control: Position, velocity, current3, torque3
- High-level control: Cartesian position/velocity, joint position/velocity, force3, torque3
- Controller sensors: Voltage, current, accelerometer, temperature and gyroscope
INTERFACE MODULE
- Các giao diện:
+ RS-4853
+ Ethernet: 100 Mbps
+ GPIO3
+ I2C 3
+ UART 3
+ Power: 24 V
- Vision module:
+ Color sensor
+ Depth sensor
+ Interface sensors: Accelerometer and gyroscope, voltage, temperature