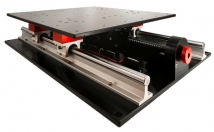
The Hexapod is a research-grade six degrees of freedom (DOF) parallel robotic motion platform capable of achieving high accelerations. The Hexapod is an open architecture platform which can be programmed through QUARC software for Simulink. Unlike most commercially available Stewart platforms, the Hexapod is comprised of a six high quality linear ball-screw actuators and driven by six superior DC motors, which makes it precise, responsive, and low maintenance. With the payload of up to 100 kg and its safety features, Hexapod is an ideal motion simulator for any research lab focused on vibration isolation, structural dynamics, immersive simulation, or rehabilitation.

_thumb_500x344.png)