A modular lab platform for teaching robotics, mechatronics, and controls
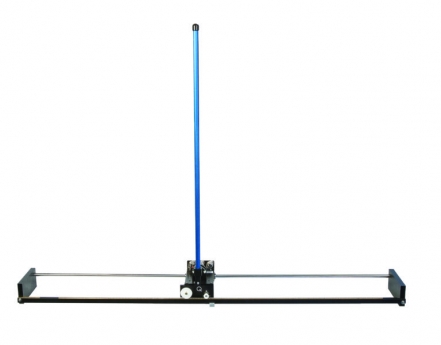
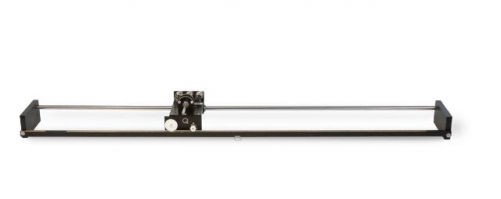
The Linear Servo Base Unit is the fundamental unit for the Quanser linear motion platform. It is ideally suited to introduce basic control concepts and theories on an easy-to-use and intuitive platform.
Use it on its own to perform several experiments, or expand the scope of this unit by adding on other modules to teach an even wider range of experiments. The scalability of the platform gives you an opportunity to expose students to a variety of linear control challenges for a minimal investment.
CURRICULUM TOPICS PROVIDED
Modeling Topics
• Derivation of dynamic model using Lagrange
• State-space representation
• Linearization
Control Topics
• Linear-quadratic regulator (LQR)
• Hybrid control
• Pole placement
• Energy-based/non-linear control
SPECIFICATION
• Medium pendulum mass (with T-fitting): 0.127 kg
• Medium pendulum length (pivot to tip): 33.7 cm
• Long pendulum mass: 0.230 kg
• Long pendulum length (pivot to tip): 64.1 cm
• Encoder resolution of linear servo base unit pendulum shaft (in quadrature): 4096 count/rev